
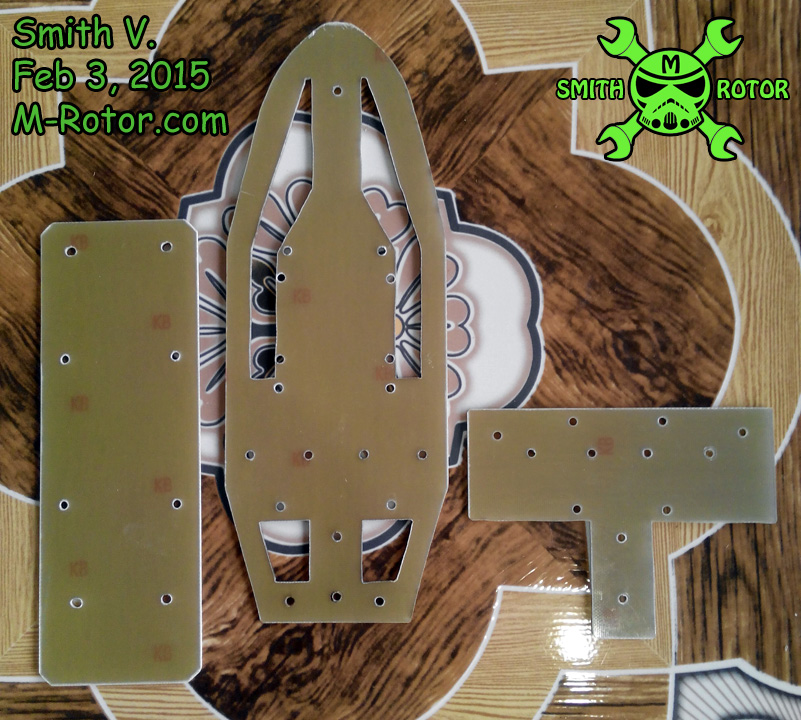
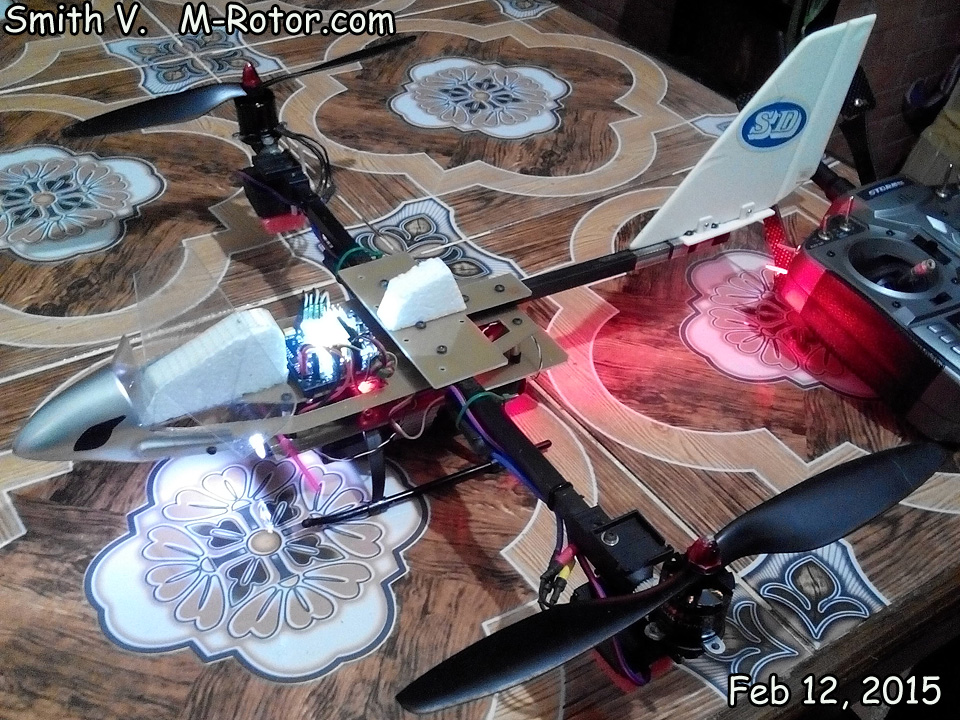
Feb 1, 2015 Smith Bi-Copter V1.2
I change flight control board to KK2.1 use firmware 1.19S1 Pro
and add bottom plate for lower CG








Feb 1, 2015 KK2.1 dualcopter FW 1.19S First test
my build bi-copter installed with KK2.1 FW 1.19S – DualCopter, Test Flight #1
Feb 3, 2015 KK2.1 DualCopter FW 1.19S1 Second test
second test with modify motor tilt. it flying better than the first test so much.
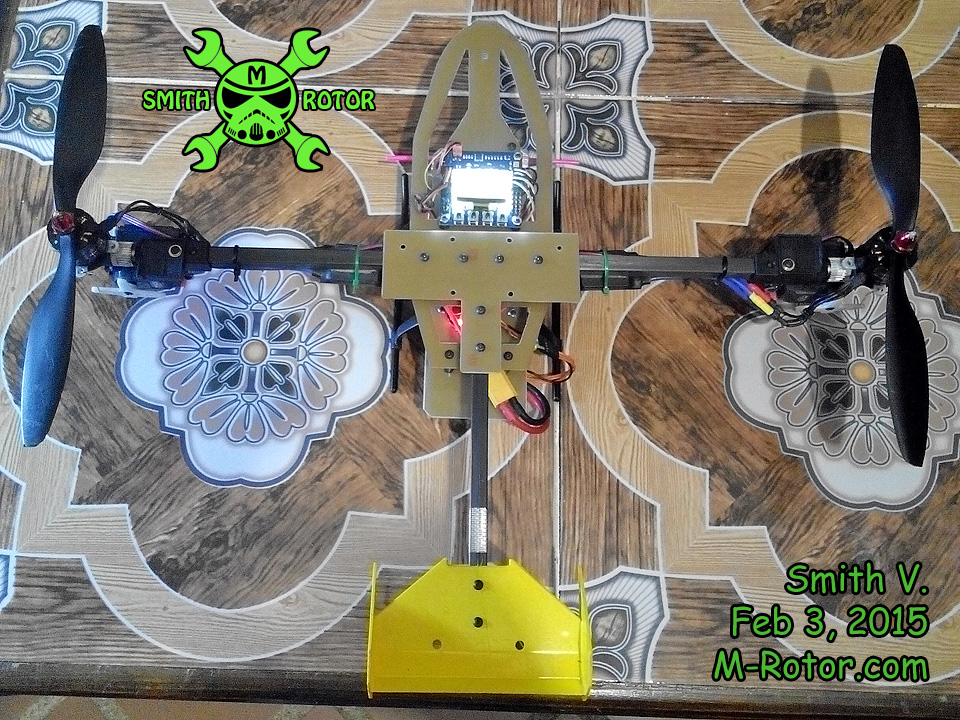
Feb 4, 2015 Smith Bi-Copter V1.2 First Flight
First flight of my build bi-copter ver 1.2 ,
Flight control KK2.1 firmware ver 1.19S1 DualCopter
Motor: EMAX2213 / propeller EMAX 1045
Servo: Sanwa SRM102
Battery: Li-Po 3S 11.1V 3000maH 30C
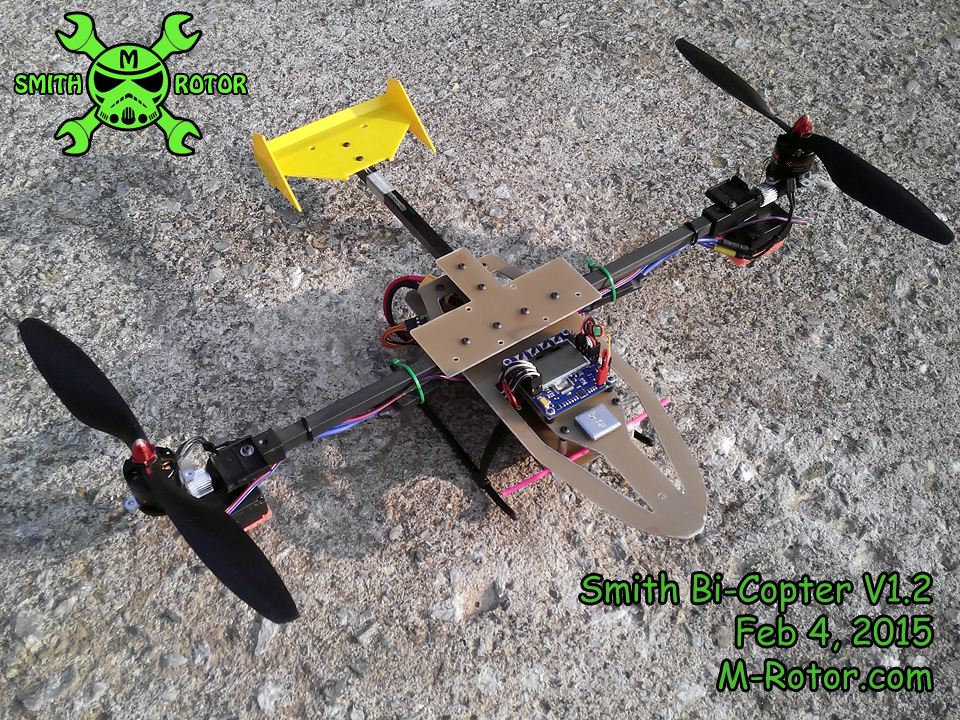
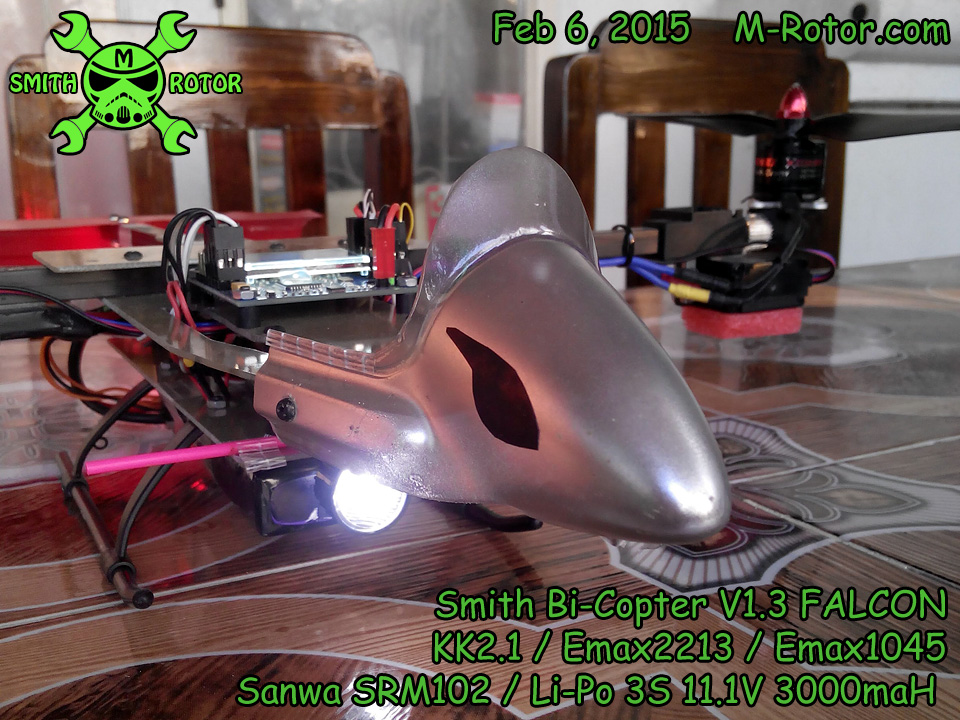
Feb 4, 2015 Smith Bi-Copter V1.2 Fly with head shell
This flight for test flying with head shell attach.
Smith Bi-Copter frame V1.2 / KK2.1 / EMAX2213 / EMAX1045 / Sanwa SRM102 / Li-Po 11.1V 3000maH 30C
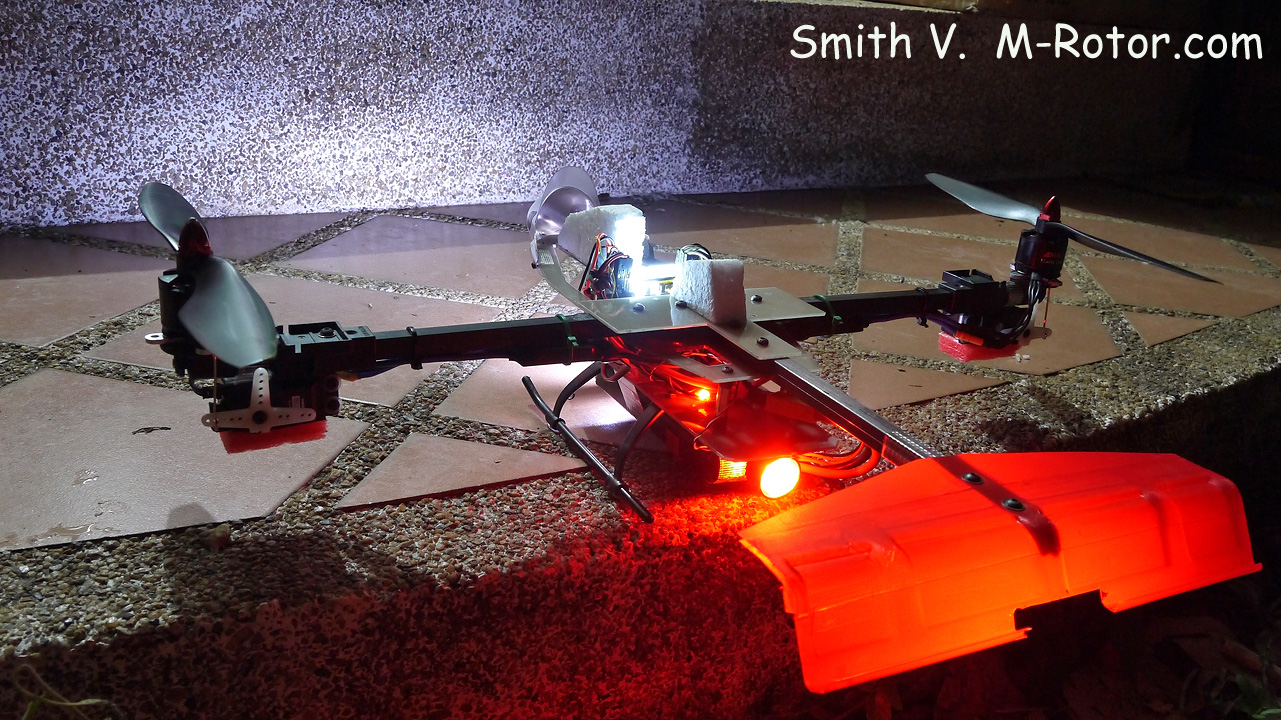
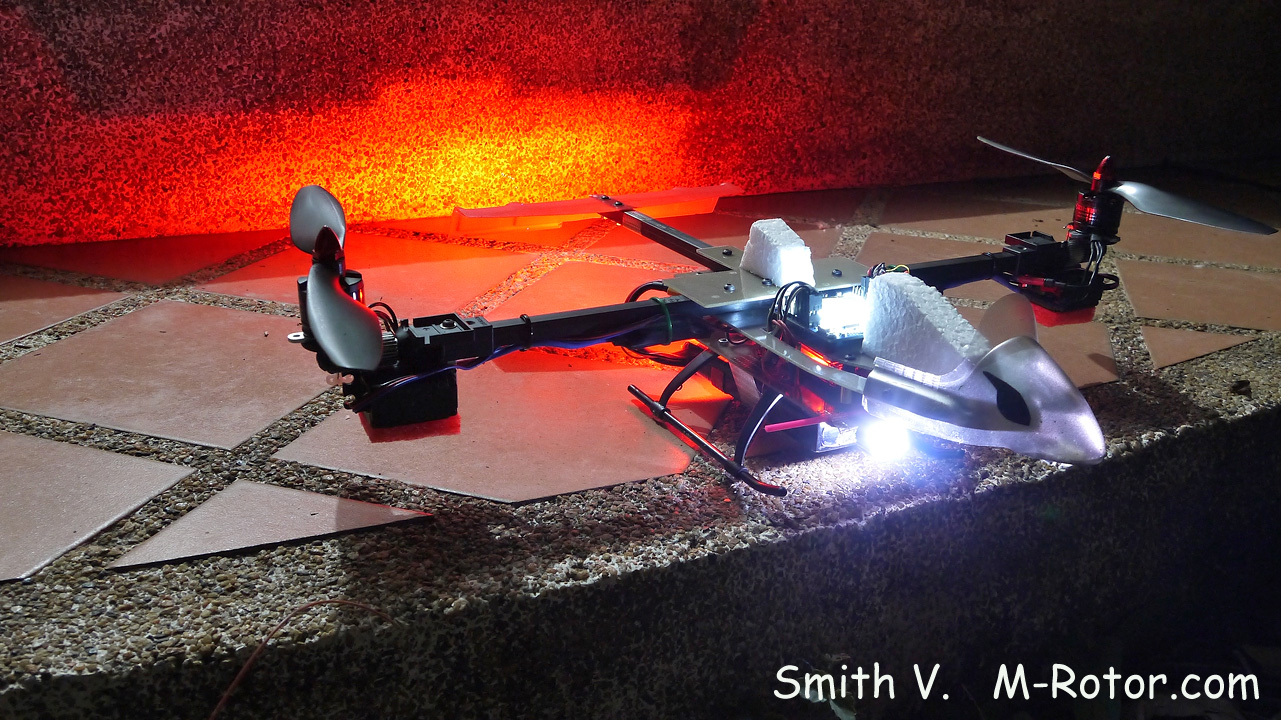
Smith Bi-Copter V1.3 Falcon











Feb 7, 2015 Smith Bi-Copter V1.3 Falcon – Full 9 min fly continuous
test flight for my build bi-copter FALCON. full 9 minute continuous flying UNCUT, so you can see it stable fly well?
Frame: Smith bi-copter V1.3 FALCON
FCB : KK2.1 firmware 1.19S1 DualCopter
Motor : EMAX 2213 , Propeller EMAX 1045
Servo: Sanwa SRM102
Battery: Li-Po 3S 11.1V 3000maH 30C
Feb 8, 2015 KK2.1 Bi-Copter (DualCopter) – My build Falcon
My build Bi-Copter V1.3 Falcon – Short demo with hawk sound
Flying my build falcon in the morning, video was mixed with hawk sound effect
Feb 15, 2015 My bi-copter almost to gone with the wind
Morning flight of my bi-copter. today have winter wind that come from north to south. my bi-copter almost to gone with the wind.
KK2.1 / Emax2213 / Emax1045 / Sanwa SRM102 / Li-Po 3S 11.1V 3000maH 30C
Hi
I like your project, I am assembled bicopter using kk 2.1, but I can’t tuning the controller PI, do you have the constant to send me?
for bi-copter, use only P valueม P gain = 30 / P Limit = 100 , don’t use I (I gain=0 / I limit = 0).
and use low frequenvy for ACC (filter=20Hz) is good for bi-copter.
Thanks for the reply , but the values are all settings in PID ? Roll , Yaw one step?
Wow, this article is pleasant, my sister is analyzing these things,
so I am going to let know her.
I’m curious to find out what blog platform you are
utilizing? I’m experiencing some small security issues with my latest blog and I’d
like to find something more secure. Do you have any suggestions?
i’ve KKboard FW version 1.18S1 pro ,i wanna build up bicopter/dualcopter but how to mix up the servo?
My mixer for bi-copter
Roll CH1, Pitch CH2, Throttle CH3, Yaw CH4, Aux CH5
CH, THR, AIL, ELE, RUD, OFS, TYPE, RATE
CH1, 100, 100, 0, 0, 0, ESC, High
CH2, 100, -100, 0, 0, 0, ESC, High
CH3, 0, 0, 100, -100, 50, Servo, Low
CH4, 0, 0, -100, -100, 50, Servo, Low
thanks for the mixer….. i want to ask it’s normal when i tilt the board to the left, the supposed reaction is the left motor spinning at higher speed to counter back the situation, but what i faced is when i tilt the board to the left, the right motor spin at high speed…. it’s normal? or i need to do something to the board?
thanks for the mixer….. i’ve a problem when i tilt the board to the left, the supposed reaction is the left motor spinning at higher speed to counter back the situation, but what i faced is when i tilt the board to the left, the right motor spin at high speed and fliping……what need to do with setting of the board?
Sir i am studying mechanical 2nd year.I do your project but i have no idea.So please send me some tutorial of making bi-copter or otherwise send me some instruction.
Many thanks for your settings you shared Thanks